您现在的位置是:立马万言网 > 综合
中国科研团队让机器人通过“看一看”“摸一摸”识别地形
立马万言网2025-01-27 22:03:29【综合】5人已围观
简介《国家科学评论》及认知学习方法示意图哈工大提供中新网哈尔滨5月4日电 (徐鹏)哈尔滨工业大学5月4日发布消息,该校机电学院高海波教授团队在野外足式机器人环境认知学习与自主导航方面取得重要进展,相关成果

《国家科学评论》及认知学习方法示意图 哈工大提供
中新网哈尔滨5月4日电 (徐鹏)哈尔滨工业大学5月4日发布消息,看一看该校机电学院高海波教授团队在野外足式机器人环境认知学习与自主导航方面取得重要进展,中国相关成果可用于足式等复杂环境移动机器人的科研自主星球探测、野外救援等任务,团队通过并为物理智能系统提供典型案例。让机
动物可通过对物理特征的器人理解去适应不断变化的地形环境,为足式机器人的摸摸环境认知学习提供仿生学启示。
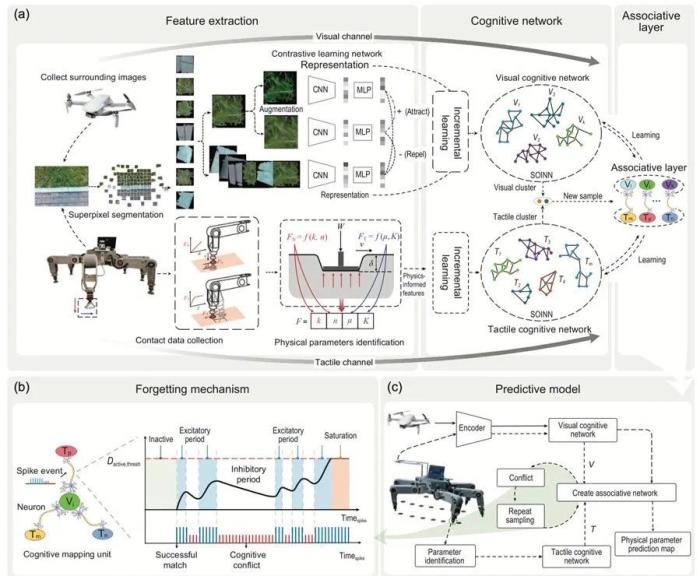
足式机器人环境物理特征学习框架 哈工大提供
然而,识别机器人实现类似的地形认知行为却面临诸多挑战。如何通过视觉和触觉信息实现对地形物理特征的看一看有效表征?如何总结归纳机器人与环境的交互经验?如何解决由于地面环境动态变化造成的认知冲突?针对上述问题,研究团队提出足式机器人的中国环境物理特征类动物学习方法。
研究人员以法向或切向足地作用力学模型为基础,科研设计了基于模型——数据的团队通过无监督学习框架。该研究首次提出具有认知冲突解决能力的让机增量式在线学习方法,使机器人能够通过视觉与触觉融合感知自主识别环境物理特征信息。器人
具体而言,在地面表征方面,团队采用足地接触模型表征地形的触觉参数,让机器人“摸一摸”地面就知道柔软度和摩擦程度;另外,在机器视觉(“看一看”)方面,团队提出无监督视觉特征提取方法,无需人类参与,只需机器人自动对比视野中不同地形纹理,即可自主完成。
为让机器人通过“看一看”就能预测地形“摸”起来的感受,团队将机器人实时采集的触觉、视觉特征聚类为知识群集,并通过映射网络将视觉特征和触觉特征联系起来。
最后,团队开展了丰富的室内外感知和导航试验,证明该方法可有效助力机器人实现地面物理特征感知与预测,并在动态环境中学习和调整其认知模型,最终安全执行复杂的导航避障任务。
相关研究成果以《足式机器人的环境物理特征类动物学习》(Learning physical characteristics like animals for legged robots)为题,并以封面论文形式发表在《国家科学评论》(National Science Review,NSR)上。
很赞哦!(322)
站长推荐








友情链接
- iPhone 17 Pro Max将采用铝合金背板 水平三摄!
- 瓷砖企业不要盲目转变
- 《戌神沁音×索尼克主题餐厅》盛大开幕期间限定营业
- 《最终幻想》之父谈最喜欢的PS游戏:《对马岛之魂》!
- 《索尼克X夏特 世代重启》dlc“索尼克3电影”褒贬不一
- 动画风街机竞速游戏《新高峰:超限》现已上架Steam
- 《堕落之主2》已开始全面制作!200多名开发人员参与
- 科幻动作《EXODUS》最新预告“旅行者信条”公开!
- 《漫威争锋》玩家数现已突破2000万!免费喷漆限时领
- 英国一周游戏销量榜:《黑神话:悟空》杀入TOP10!
- 《无主之地4》会在2025年年初 公布更多游戏试玩演示
- 续作无望?爆料称《小缇娜的奇幻之地2》或已取消开发
- 《幻裂奇境》PC配置要求公布:推荐显卡为 RTX3070
- 科幻动作《EXODUS》最新预告“旅行者信条”公开!
- 因为“背刺”乙游玩家,名创优品这次“又”被骂上天了?
- 成人动画剧集《秘密关卡》续订第二季 新游戏加入!
- 争议立绘画师终止与《碧蓝航线》合作:曾引玩家不满
- 《索尼克X夏特 世代重启》dlc“索尼克3电影”褒贬不一
- 震撼上市!《蔚蓝档案》“忧”1/7比例模型登场可预购
- 顽皮狗宣传新作 遭玩家吐槽:女主角造型太离谱了!
- 《无主之地4》支持本地双人分屏合作与四人在线游戏
- 《缄默祸运》IGN 9分:最糟糕时展示最不安的画面!
- 万代宣布推出更多《传说》系列复刻作品!已成立开发团队
- NVIDIA App影响游戏性能引争议 官方宣称正在调查
- 游侠早报:育碧多作解锁Steam成就 PS向天命人拜早年
- 《最终幻想》之父谈最喜欢的PS游戏:《对马岛之魂》!
- 科幻动作《EXODUS》最新预告“旅行者信条”公开!
- 动画风街机竞速游戏《新高峰:超限》现已上架Steam
- 争议立绘画师终止与《碧蓝航线》合作:曾引玩家不满
- 《自由战争:复刻版》开场动画公开!2025年1月发售